超音波センサーの基本
超音波センサーは数十年にわたって販売されてきましたが、その性能、柔軟性、低コストにより、センシング市場の大きな部分を占めてきています。より多くの製品が自律型になるにつれ、ロボット、自律型車両、ドローンへの搭載だけにとどまらずその需要はさらに高まっています。超音波センサーがどのように機能するか、どのように利用できるか、使用するメリットとデメリット、そしてそれらの一般的なアプリケーションについて理解することで、導入時だけでなく現在もどのように超音波センサーが関連しているかについてわかります。
超音波センサーとは?
超音波センサーは通常、23 kHz~ 40 kHzのチャープを放射します。これは、20 kHzの人間の聴覚の典型的な可聴範囲よりもはるかに高いため、超音波という用語が使われます。このチャープを使用して、音が物体から跳ね返るのにかかる時間を測定します。これは、コウモリが獲物を見つけるために使う共振と同じ基本原則に基づいています。室温における空気中の音の速度は343メートル/秒です。その時間は簡単に距離に変換でき、超音波チャープは感知される物体との距離の両方を往復します。
距離(メートル)=(経過時間 [秒] * 343 [メートル/秒]) / 2
この単位は、特定のアプリケーションのニーズに適合するようにこの式で変更できますが、この式は、超音波センサーの比較的単純な動作を示しています。
超音波センサーの仕組みは?
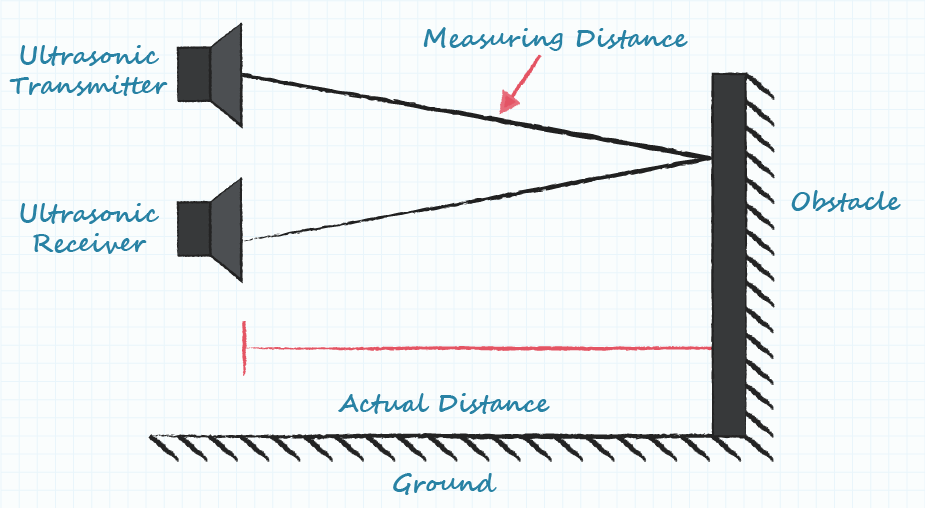
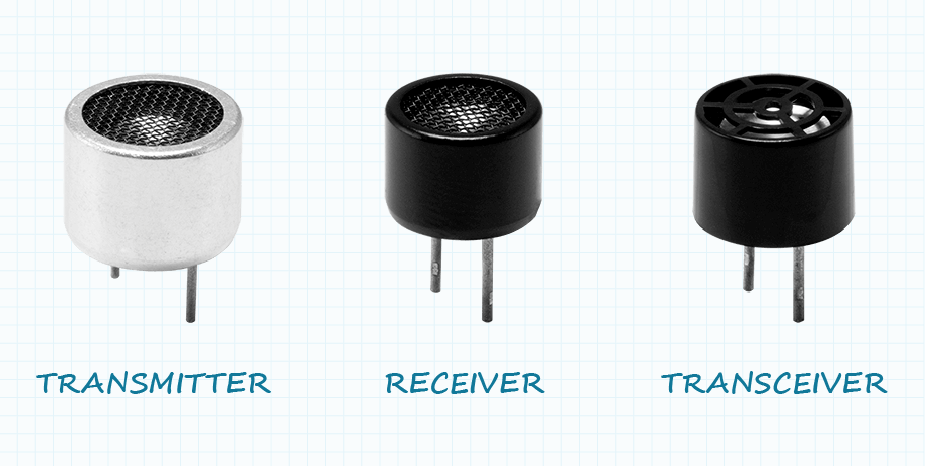
理論から現実へと移行する中、超音波センサーには、トランスミッタとレシーバの両方、2つの部品が必要です。最も標準的な構成では、これらは合理的に可能な限り横に並べて配置されます。レシーバをトランスミッタに近づけると、音はトランスミッタから検出された物体まで直線状に伝わり、レシーバに戻るため、測定値の誤差が小さくなります。また、トランスミッタとレシーバの機能を単一ユニットに統合した超音波トランシーバもあり、PCBフットプリントを大幅に縮小しながら、エラーを物理的に可能な限り最小限に抑えます。
トランスミッタから出る音波は、レーザーより光からフラッシュライトが発せられる方に近い形状であるため、拡散角とビーム角を考慮する必要があります。音波がトランスミッタから遠ざかるにつれて、検出領域は横方向と垂直方向に拡大します。この変化領域が、超音波センサーがカバレッジ仕様を標準的な検出領域ではなく、ビーム幅やビーム角度のいずれかで提供する理由です。このビーム角度をメーカー間で比較する場合は、ビーム角度がビームの全角度またはトランスデューサからの直線からのばらつきの角度のいずれかであることを検証することが推奨されます。
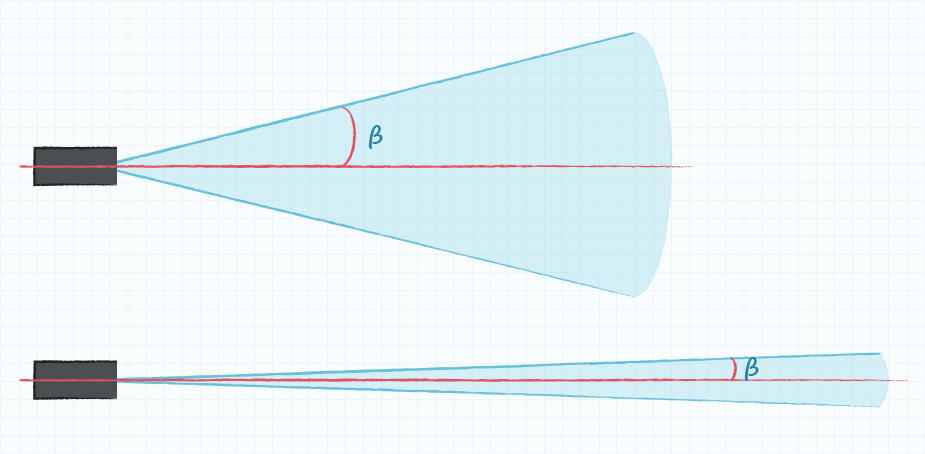
ビーム角度の二次効果は、デバイスの範囲です。一般に、狭いビームは、超音波パルスのエネルギーがより集束され、使用できないレベルまで消散する前にさらに進むことができるため、より大きな検出範囲をもたらします。逆に、より広いビームは、より広い拡がり角内でそのエネルギーを拡散し、予想される検出範囲を減少させます。理想的なビーム幅の選択は、アプリケーションに大きく左右されます。広いビームは広い領域をカバーし、一般的な検出に優れています。また、狭いビームは検出領域を制限することで誤検出を回避します。
超音波伝送器、受信機、トランシーバーの違いは何ですか?
個別のコンポーネントを検索する場合、超音波センサーは独立したトランスミッタとレシーバとして、または超音波トランシーバと呼ばれる1つのユニットでの2つの組み合わせとして取得できます。超音波トランシーバーは送受信機能が1台のユニットに統合されており、最終設計でPCBスペースを節約できます。しかしながら、トランシーバーは通常、約30cm以上の大きな「ブラインドゾーン」(すなわち、最小作業範囲)があります。ブラインドゾーンを約5cmにまで改善する高周波超音波トランシーバーがあります。
個々の送信機と受信機を組み合わせる主な利点は、0cm~20cm範囲のそのより小さなブラインドゾーンにあります。また、これらはトランシーバーよりも優れた感度定格を保持しています。トランシーバーは、信号、特に環境要因によって妨げられる可能性のある弱い信号の検出に直接相関します。個々の送信機/受信機の組み合わせは、トランシーバーよりも少ない電力で駆動でき、同時に同じ信号感度を達成できるため、これは特に電力に制約のあるアプリケーションに有用です。個々の送信機と受信機のペアを選択する場合、最良の信号感度を達成するためには、送信機と受信機の周波数定格が互いに1 kHz以内であることを確認することが重要になります。
超音波トランスミッタ、レシーバ、またはトランシーバは多くの場合個別に購入され、カスタム回路やファームウェアと一緒に組み立てられますが、標準の範囲検出構成でPCB上にあらかじめマウントされた単一ユニットやシンプルなロジックボードとして提供されることもあります。このようなモジュールでは使用方法は簡単になりますが、設計者はこれらを使用することで、柔軟性とカスタマイズ性というメリットがなくなってしまいます。
アナログとデジタルの超音波センサーの比較
大半のアナログ超音波センサーオプションでは、エコーが検出されると、レシーバが信号を返送しながらトリガ信号をトランスミッタに送信することで作動します。パルスの長さとエンコードは、設計者が必要に応じてカスタマイズできます。このプロセスは、トリガーとエコーとの間の時間計算とデコーディングをホストコントローラに最終的に残します。ボード上で距離を計算し、通信バスを介してホストに距離を送信するデジタル超音波センサーモジュールがあります。
超音波センサーの長所と短所
超音波センサーは他の技術と同様に、特定の状況や用途においては他のものよりも便利です。超音波センサーの持つ強みには、次のようなものがあります。
- 超音波センサーは、水やガラスなどの半透明または透明な物体など、検出される物体の色の影響を受けません。
- また最小および最大範囲には極めて柔軟性があり、ほとんどの超音波センサーは、数センチメートル付近から最大約5メートルまでを検出できます。特別構成されたモジュールでは、最大20メートルまで測定できます。
- これは数十年にわたって使用されてきた成熟した技術であり、非常に信頼性も高く、よく理解されており、一貫した結果をもたらします。
- 超音波センサーは、1%以内の比較的正確な測定を提供し、必要に応じてさらに精度を高めることができます。
- 1秒あたり多くの測定を行うことができ、迅速なリフレッシュ・レートが得られます。
- 希少な資材は必要としないため、通常はかなり安価です。
- 超音波センサーは、特に符号化されたチャープを備えたモジュールを使用する場合、電気的ノイズの多い環境やほとんどの音響ノイズに対して耐性があります。
超音波センサーは、汎用性の高い技術ですが、最終的なセンサー選択を行う前に考慮すべきいくつかの制限があります。
- 音の速さは温度と湿度に依存するため、環境条件によって測定の精度が変わることがあります。
- 検出領域は三次元ですが、超音波センサーは検出器から一定の距離にあるもののみを検出し、物体が感知領域にある場所や形状や色などの特徴に関するフィードバックは提供できません。
- 超音波センサーは、フォームファクターは比較的小さく、自動車や産業用アプリケーションにも安心して統合できますが、非常に小さなエンベデッド・プロジェクトには大きすぎる場合があります。
- これはその他のセンサーと同様に、汚れたり、濡れたり、凍ったりして不規則になったり、機能しなくなったりすることがあります。
- 超音波センサーは音に依存性があり、ある程度媒体に依存するため、真空では機能しません。
超音波センサーは一般的にどこで使用されますか?
最も一般的な超音波センサーアプリケーション2つのうち1つは、液体レベルセンシングです。これは、液体が色や不透明度を問わず、非接触でも検出できるためです。2つ目は、低コストでシンプルだという特性を利用した、一般的なオブジェクト検出です。特定のオブジェクト検出アプリケーションには、車両用の衝突防止検出、人検出、存在検出、ボックスソート、フォークリフトによるパレット検出、飲料充填機でのボトルカウントを始めとする多くのものがあります。
超音波センサーのより創造的な使用の例としては、超音波送信機と受信機の一方通行機能を個別に使用することが挙げられます。超音波パルスは人間では可聴範囲外ですが、さまざまな動物で聴覚の範囲内にあります。超音波トランスミッタは、そのエミッタを使用して鳥などの動物を威嚇できると考えられています。また、超音波レシーバはノイズ検出に使用することができます。
概要
超音波センサーは良く知れ渡った技術で、多くの産業および消費者アプリケーションにおいて極めて妥当性の高い技術であり続けます。そのシンプルさ、低コスト、堅牢な構造により、存在検出や距離測定を必要とする多くの新製品に最適です。ハードウェアとソフトウェアの構成の両方を変更できますが、より厳しい状況でも非常に汎用性があります。
 タグ:
タグ: